Unlocking the Underwater Frontier
Despite covering over 70% of Earth's surface, the underwater realm remains one of the least explored frontiers of our planet. This unexplored territory holds immense value—from untapped renewable energy sources like offshore wind to vital ecological information that can support climate research and conservation efforts. To access these depths efficiently and safely, Autonomous Underwater Vehicles (AUVs) are gaining prominence as essential tools. These vehicles can perform detailed seabed mapping, infrastructure inspection (e.g., underwater pipelines and wind farms), and even engage in high-stakes missions like search and rescue.
A significant obstacle, however, is the complexity and unpredictability of underwater environments. Unlike surface or aerial vehicles, AUVs often navigate in low-visibility conditions, with dynamic obstacles and shifting terrain. This makes reliable path planning and collision avoidance not just helpful, but mission-critical. Our research presents a tightly integrated approach that combines both pre-planned intelligence and real-time adaptability through simulation-driven development.
Charting the Course: Path Planning Strategies
Single AUV Path Planning
At the core of AUV autonomy is the ability to chart a collision-free path to a target location. For single-agent scenarios, we studied various search-based algorithms for offline mission planning. Each algorithm was assessed using a framework of metrics:
- Computational time: How fast can a viable path be found?
- Success rate: How often does the algorithm complete its objective?
- Path length: How efficient is the resulting route?
- Path deviation: How close is the route to the theoretical optimum?
Among the algorithms evaluated, the Dstar (Dynamic Astar) algorithm emerged as the most suitable. A cousin of the classic Astar algorithm, Dstar is designed to reconfigure its planning when small changes occur in the environment—such as the detection of a new obstacle. Although named "Dynamic," it is primarily used in our research for offline planning due to its stable and predictable behavior under minor environmental perturbations.
Coordinated Multi-AUV Navigation
The path planning problem becomes exponentially harder when multiple AUVs must coordinate within the same operational space. A naive approach—treating other AUVs as static obstacles—can result in inefficient paths and even deadlocks. To overcome this, we implemented a Conflict-Based Search (CBS) strategy, a two-level framework highly suited for multi-agent planning:
- At the high level, the algorithm detects potential path conflicts between AUVs by constructing and maintaining a Constraint Tree (CT). This tree defines the rules under which agents may or may not pass through certain points.
- At the low level, the Dstar algorithm performs individual searches for each AUV that satisfy the constraints in the CT.
We also evaluated Astar within this context, particularly for situations requiring a responsive recalculation based on nearby agents. This hybrid planning allows for efficient utilization of limited underwater communication and spatial constraints, ensuring each vehicle completes its route without collision or blockage.
Avoiding the Unexpected: Collision Avoidance Mechanisms
While pre-planned strategies are important, underwater environments are inherently dynamic, often presenting AUVs with sudden obstacles such as floating debris, marine animals, or changes in seafloor topology. For these situations, our system deploys a real-time collision avoidance mechanism powered by a modular design.
Our architecture is composed of three interdependent modules:
Navigation Module
This module acts as the AUV's sensory interpreter. It collects and processes data from onboard sonar and visual sensors to detect obstacles. Once an obstacle is identified, the module calculates its orientation and relative coordinates, providing foundational data to the decision-making layer.
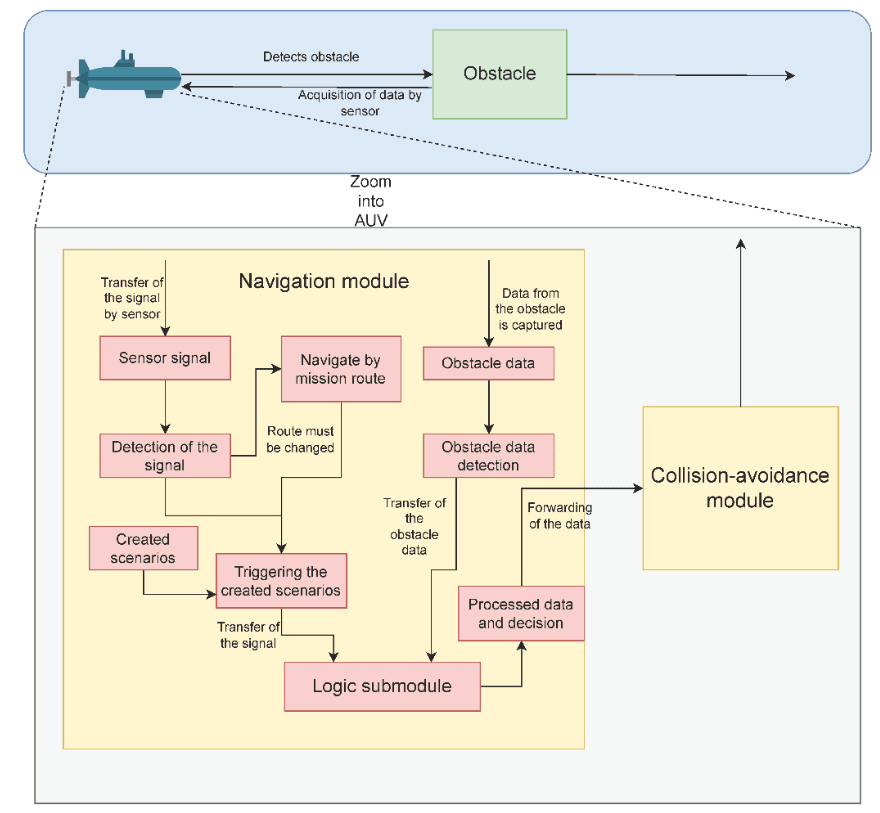
Logic Submodule
Upon receiving obstacle data, this module calculates absolute distances to the visible outer edges of the object and applies a predefined set of avoidance rules. If the left-side detour is shorter, the AUV steers left; otherwise, it chooses the right. These decisions are made under a strict safety buffer to ensure that evasive paths don't trigger secondary risks.
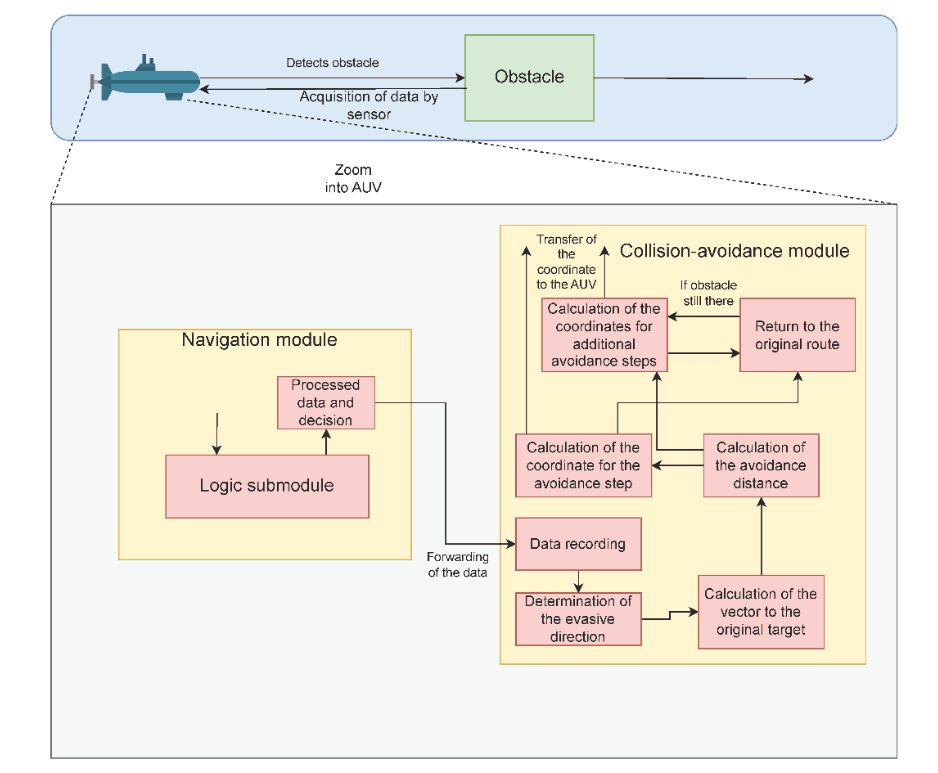
Collision-Avoidance Module
Finally, the system executes the calculated manoeuvre. Using the BonnMotionMobility extension within the OMNeT++ simulation environment, the vehicle is re-routed along a new set of coordinates. This rerouting can be as simple as a short lateral move or involve a multi-step, dynamically updated detour around persistent or clustered obstacles.
Simulations and Real-World Implications
To verify and evaluate our proposed system, we built a simulation environment using OMNeT++ combined with the INET protocol suite and the BonnMotionMobility model to mimic realistic AUV motion.
Our validation approach consisted of multiple case studies:
- Single AUV missions navigating a complex underwater terrain near Warnemünde, Germany. These tests focused on path efficiency, algorithm stability, and obstacle response times.
- Multi-AUV coordinated missions set around the Barrow Wind Farm in the UK, where simultaneous inspections were carried out by a group of cooperating vehicles. Here, we emphasized communication efficiency, conflict resolution, and mission completion rates.
- Dynamic collision avoidance scenarios using simulated floating and stationary obstacles. These were used to test the adaptability of our logic submodule and the effectiveness of multi-step evasive routes.
Together, these simulations highlight the real-world viability of our integrated architecture. The system demonstrates strong autonomy in adapting mission plans in real-time, increasing both operational safety and mission success in diverse underwater settings.
Want to dive deeper into the technical details? Read the full research paper (PDF) or view the publication on TOMS.
Authors
- Peter Danielis
University of Rostock, Institute of Computer Science, Rostock, Germany - Willi Brekenfelder
University of Rostock, Institute of Computer Science, Rostock, Germany - Helge Parzyjegla
University of Rostock, Institute of Computer Science, Rostock, Germany - Pranavkumar Ghogari
University of Rostock, Institute of Computer Science, Rostock, Germany - Paul Stube
University of Rostock, Institute of Computer Science, Rostock, Germany - Frank Sill Torres
German Aerospace Center, Institute for the Protection of Maritime Infrastructures, Bremerhaven, Germany